Botanbot Sim
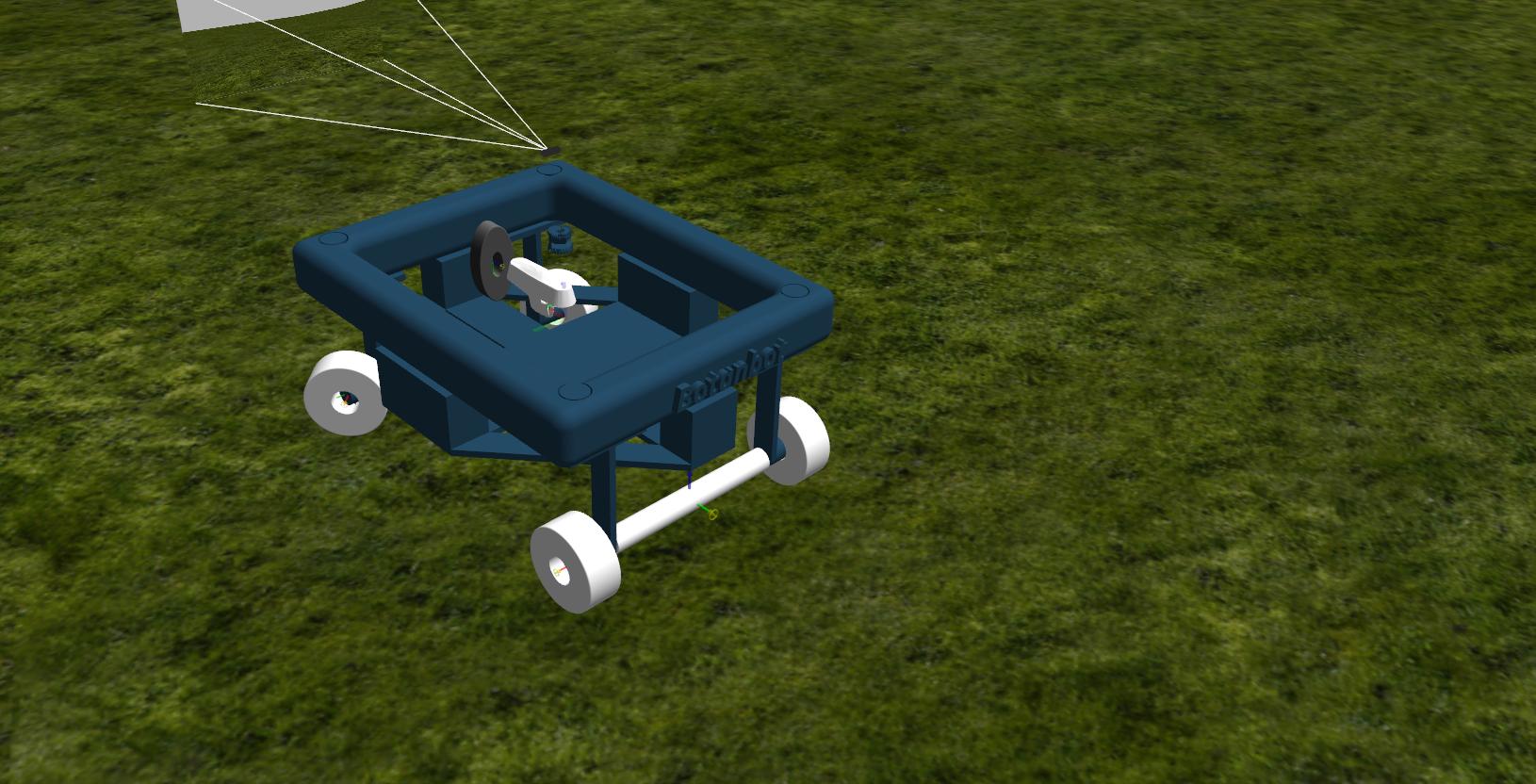
Botanbot is a simple 4 wheeled , ackermann drived mobile robot. It is simulated under Gazebo with all required essential sensors in order to do outdoor navigation. The following table shows currently supported sensors.
1. Sensor support for Botanbot
Sensor Type |
Topic |
MSG TYPE |
Update Rate |
|---|---|---|---|
LIDAR |
/velodyne_points |
sensor_msgs::msg::PointCloud2 |
30 |
RealSense D435 COLOR CAMERA |
/camera/color/image_raw |
sensor_msgs::msg::Image |
30 |
RealSense D435 DEPTH CAMERA |
/camera/ aligned_depth_to_color/ image_raw |
sensor_msgs::msg::Image |
30 |
RealSense D435 IR1 CAMERA |
/camera/infra1/image_raw |
sensor_msgs::msg::Image |
1 |
RealSense D435 IR2 CAMERA |
/camera/infra2/image_raw |
sensor_msgs::msg::Image |
1 |
GPS |
/gps/fix |
sensor_msgs::msg::NavSatFix |
30 |
IMU |
/imu/data |
sensor_msgs::msg::IMU |
1 |
Botanbot navigation in farming world

Botanbot in Hilly Gazebo world
(botanbot_sim)[https://github.com/NMBURobotics/botanbot_sim] is configured use (vox_nav)[https://github.com/NMBURobotics/vox_nav] system for 3D navigation. If you are trying to setup your robot for use with (vox_nav)[https://github.com/NMBURobotics/vox_nav], (botanbot_sim)[https://github.com/NMBURobotics/botanbot_sim] is right place to look for. A RQT based gui is also provided in (botanbot_gui)[https://github.com/NMBURobotics/botanbot_sim/tree/main/botanbot_gui], through this gui it is possible to send goal commands to action server(NavigateToPose) of vox_nav.